




近日,電氣與電子信息學(xué)院楊勇副教授團隊在非線性控制領(lǐng)域取得新進展,相繼在《IEEE Transactions on Automation Science and Engineering》(IEEE T-ASE)《Control Engineering Practice》《ISA Transactions》《Nonlinear Dynamics》等國際知名期刊發(fā)表研究論文,西華大學(xué)為論文第一單位。
面向永磁同步電機在機器人、精密儀器和數(shù)控加工等高端裝備領(lǐng)域的需求,團隊在《IEEE Transactions on Automation Science and Engineering》(中科院JCR 2區(qū))發(fā)表題為“Enhanced Disturbance Attenuation for PMSM Speed Control Based on Advanced Fast Reaching and Iterative Composite Compensation”的研究論文。針對電機轉(zhuǎn)矩脈動與負載擾動等問題,提出了一種基于先進快速趨近律與迭代復(fù)合補償?shù)挠来磐诫姍C增強抗擾調(diào)速方法,利用迭代學(xué)習(xí)和滑模觀測器方法有效提高了負載擾動觀測精度與系統(tǒng)魯棒性。IEEE T-ASE為IEEE旗下的自動化科學(xué)與工程領(lǐng)域的頂級期刊。涵蓋了自動化領(lǐng)域的各個方面,包括自動化理論、方法與算法、自動化系統(tǒng)與工程、人工智能在自動化中的應(yīng)用、生物醫(yī)學(xué)自動化等。

IEEE T-ASE論文截圖
圍繞可穿戴外骨骼機器人安全人機交互,團隊在《Control Engineering Practice》(中科院JCR 2區(qū))發(fā)表題為“Reference trajectory learning based adaptive iterative impedance control for a lower limb rehabilitation exoskeleton with actuator saturation”的論文。提出了一種雙迭代環(huán)阻抗學(xué)習(xí)控制策略,外環(huán)利用力矩迭代學(xué)習(xí)肢體運動意圖,內(nèi)環(huán)采用位置迭代實現(xiàn)阻抗調(diào)控。《Control Engineering Practice》是工程控制領(lǐng)域頂級期刊,《Automatica》的姊妹期刊,僅發(fā)表對先進控制技術(shù)具有重要應(yīng)用價值的成果。此外,團隊還在《ISA Transactions》(中科院JCR 2區(qū)Top)上發(fā)表題為“Adaptive neural fault-tolerant prescribed performance control of a rehabilitation exoskeleton for lower limb passive training”的論文,解決了執(zhí)行器故障條件下可穿戴外骨骼機器人預(yù)定性能容錯控制問題。

可穿戴外骨骼機器人示意圖
針對高速列車運行控制問題,團隊在《Nonlinear Dynamics》(中科院JCR 2區(qū))發(fā)表題為“Adaptive iterative learning unified operation control for high-speed train considering electrical structure model and temperature compensation”的論文。將高速列車電氣化系統(tǒng)的電結(jié)構(gòu)模型引入牽引/制動系統(tǒng),同時兼顧不同運行區(qū)間氣候變化對高速列車空氣阻尼的影響,提出了可用于時速350km/h的高鐵動車組一致運行控制方案。《Nonlinear Dynamics》是非線性力學(xué)領(lǐng)域國際著名期刊,發(fā)表非線性力學(xué)、動力學(xué)控制、機器人及航空航天、多體動力學(xué)等領(lǐng)域研究成果。
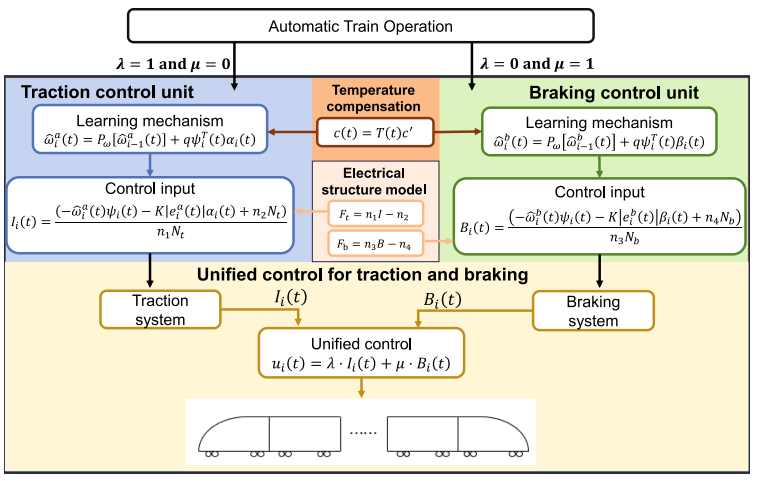
高鐵動車組一致運行控制方案示意圖





 川公網(wǎng)安備 51010602000503號
川公網(wǎng)安備 51010602000503號